3D lidar scanning modeling
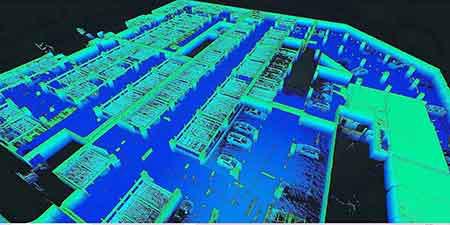
3D laser scanning adopts non-contact high-speed laser measurement to obtain the geometric data, and image data of terrain or complex objects, process and analyze the collected point cloud data and image data through post-processing software, convert them into 3D spatial position coordinates in absolute coordinate system or establish 3D visualization model of complex and irregular scenes, which saves both time and effort, at the same time, the point cloud can also output a variety of different data formats as the data source of the spatial database and meet the needs of different applications. The 3D laser scanning technology can present the real scene 1:1 in the form of point cloud in the computer, so it is also called the live scene replication technology.

With the continuous expansion of the application field of UAV, the demand for UAV to perceive the surrounding environment is gradually increasing. The application of laser radar technology has become an important development trend in the research field of UAV. In order to solve the problem of poor field positioning signal caused by the complex environment of UAV during flight, based on 3D laser radar, combined with Onboard SDK technology of Dajiang UAV, the airborne laser point cloud acquisition system and laser point cloud processing algorithm are designed. In order to reduce the operation difficulty of the laser acquisition system, an obstacle avoidance algorithm is designed, which combines the laser point cloud with the established flight route to avoid obstacles. The laser point cloud SLAM algorithm is used to realize the three-dimensional modeling of the surrounding environment of the UAV, so as to achieve the purpose of the UAV's perception of the surrounding environment. The effectiveness of the proposed method is verified through actual tests.