GIS spatial analysis and spatial dynamic modeling
At present, GIS has been widely accepted as a mature tool and technology for managing, storing, querying and analyzing geospatial distribution information. In recent years, more and more challenges have been posed to GIS, which is essentially static, to turn this system into an economical and feasible tool to support simulation space-time process, serving scientific research and resource management. At present, most GIS software can not support dynamic process calculation models in multi-disciplinary fields, including hydrology, ecology and other geosciences and biological sciences. Most GIS systems only provide input parameters and display output results for the models. The difficulties in integrating spatial analysis and spatial dynamic modeling of GIS lie in:
There are important conceptual differences among field scientists, data collectors and GIS technicians, which lead to great differences in the abstract way of the real world, how to use computers to organize and structure data.
Data recorded and stored in GIS may not be the most suitable data format for the model, and sometimes need to be transformed.
Unless very familiar with computer programming, it is a difficult and time-consuming process to write a dynamic model of spatial processes.
Many visualization methods of GIS software do not support interactive spatial-temporal representation of model results.
Open system simulation methods (e.g. cellular automata) which meet the requirements of many scientists and can simulate dynamic models quickly and effectively are rarely implemented in GIS.
The so-called spatial dynamic model refers to a mathematical simulation in which some attributes or states of the earth’s surface at a specific location in the real world change with time because of their driving forces. From the point of view of calculation, the spatial dynamic model is to calculate the new state or attribute values of each spatial unit with the change of its time series information or driving force. The state or attributes of each moment can be displayed by computer in the form of animation. Its essence is still the natural extension of graph algebra and map model. However, due to the semantic limitation of spatial analysis function of GIS, it is impossible to directly support the operational primitives of spatial dynamic modeling, so many models are implemented with the support of GIS, through expansion or modification, by combining with GIS.
The combination of GIS and spatial dynamic model
There are three main ways to combine GIS with spatial dynamic model: loose integration, interactive interface and mosaic integration. Loose combination is mainly used in the case of model and GIS development. In this combination, the spatial data are queried and pre-processed by GIS, then input into the model according to the format required by the model, and the results of model calculation are converted to the format of GIS file for display and analysis. The advantage of loose integration is that there is no need to change the code of the model, and the disadvantage is that a large amount of data management and transformation work requires both model and GIS expertise. The second way to combine is to develop an interactive interface. This combination is to develop a GIS database supporting the model, and develop an interface, which can not only provide input data for the model, but also process and demonstrate the results of the model. All data conversion is carried out automatically through the interactive interface. This kind of combination has the most examples. The advantage of the interactive interface is that it provides the interface between the model and the GIS platform, and saves a lot of data input and output work. The disadvantage is that the investment in programming and data management is relatively large, and it is difficult for users to modify and rewrite the model. The third way is mosaic combination. This combination is either a simple GIS embedded in a complex model system to provide results display and interactive control functions, or a function command of GIS to rewrite the model. So the model and GIS are in the same system, they share the same database, and there is no problem of data exchange. The former mosaic method is often used when the model does not require much function of GIS. The advantage of using GIS function command to rewrite the model is that users can build their own model, but the disadvantage is that sometimes the commands and functions of GIS can not meet all the needs of building the model.
Brief introduction of cellular automata
Cellular Automata (CA) is a dynamical system defined in a cellular space composed of discrete and finite cells, which evolves in the discrete time dimension according to certain local rules. Cells are the basic units of cellular automata. Each cell has a state, which can only be taken from one finite set of states, such as “birth” or “death”, or one of 256 colors, etc. These cells are arranged regularly on a spatial grid called “cell space”; their respective states change over time, according to a local rule. The state of a cell at a certain time depends on and only depends on the state of the neighboring cells around the cell; the cells in the cell space update the state synchronously according to the local rule, and the whole cell space changes in the discrete time dimension.
The basic components of cellular automata include cell, Lattice, Neighbor and Rule. Cellular automata can be regarded as a cell space and a transformation function defined in that space. The standard cellular automata is a quaternion:
A=(d, S, N, f)
A represents a cellular automata system; D is a positive integer representing the dimension of cellular automata; S is a finite discrete set of states of cells; N represents a combination of cells in all neighborhoods, i.e. a space vector containing different cell states, which is recorded as:
N = ( s_1, s_2, s_3, ..., s_n)
n is the number of cells in the neighborhood; s_i ∈Z (integer set), i∈(1,2,…n); f is the change rule, for S_n maps to a local conversion function on S. All cells are located in the d-dimensional space, and their positions can be determined by a d-ary integer vector Z_d .
Generally speaking, the basic model of cellular automata has five main characteristics:
They are composed of discrete patterns of cells.
They evolve in a discrete time sequence.
The state of each cell is taken in the same finite set.
The state of each cell evolves according to the same deterministic rule.
The rule of cell state value depends only on the state value of cell itself and its neighboring cells.
Although cellular automata is a theoretical model derived from parallel computer architecture, it can also be used to describe discrete systems with large degrees of freedom, which can be regarded as an ideal form of discretization of partial differential equations. Cellular automata models can be used to simulate and study many phenomena, including information transmission, computation, construction, growth, replication, competition and evolution. At the same time, they provide an effective model tool for the study of the overall behavior and phenomena of systems such as order, turbulence, chaos, asymmetry and Fractal in dynamics system theory.
Cellular automata model has strong flexibility and openness. It is not a simple mathematical equation, but more like a methodology. Experts in various fields can flexibly extend each component of the model and establish an extended model suitable for simulating various thematic phenomena, which is the reason why cellular automata is widely used in social, economic, environmental, geosciences, biology and other fields. Especially, when cellular automata is in two-dimensional space, cellular spatial structure is highly compatible with raster GIS data structure. Therefore, raster GIS combined with cellular automata model can be used to simulate complex spatiotemporal dynamic processes in the framework of discrete time and discrete space. Next, a forest fire model is used to simulate the spatiotemporal dynamic spread process of forest fire by combining GIS with cellular automata model.
Cellular automata simulation forest fire spread model
Forest fire is a common natural disaster. When forest fire occurs, it is of great practical significance to simulate and predict the spread and development of fire quickly and accurately for timely deployment of fire extinguishing forces, relocation of residents and reduction of loss of people’s lives and property. The most successful forest fire model is Rothermel’s forest fire spread model, which mainly considers the following factors:
Material of forest: including fuel material load, fuel depth, fuel particle density, heat capacity, humidity needed for fire extinguishing, etc.
Fuel humidity and air temperature.
Wind speed and direction.
Topographic gradient.
The model can calculate the spread rate, intensity, range and area of forest fire.
Based on the framework of the model, some researchers combined the principles of cellular automata and GIS to establish a new forest fire model. The model is a two-dimensional cellular automata model. The basic assumptions are: uniform distribution of forests and uniform material quality; plain terrain without considering terrain effects; random wind direction, that is, without considering wind direction effects. The characteristics of the model are as follows:
Cell space: Cell space is a discrete grid dividing the actual research area according to a certain resolution. The grid unit is a square unit, which is consistent with the data structure of GIS grid.
Cell state: Each cell has four states, 0 represents no forest cover, 1 represents unburned forest, 2 represents burning forest, 3 represents burned forest.
Neighborhood definition: Each cell has eight adjacent cells as its neighborhood cells.
Conversion rule: the rule of forest fire spread, that is, the rule of fire cell expansion. We assume that the burning cells can ignite all the unburned forests in the neighborhood at one time. The specific rules are as follows:
If ni,j ( t ) = 0 or ni,j ( t ) = 3, then ni,j ( t +1 ) = ni,j ( t ) ;
If ni,j ( t ) = 2, then ni,j ( t +1 ) = 3 ;
If ni,j ( t ) = 1 and n‘ ( t ) = 2(n‘is an element in the neighbor cell set), Then ni,j ( t +1 ) = 2;
Otherwise, ni,j ( t +1 ) = 1.
This is a highly simplified forest fire spread model, the spread is a circular spread from the fire point to the surrounding area, which basically reflects an idealized forest fire spread process. In fact, this model is a basic two-dimensional universal diffusion model, which can be improved and expanded to simulate disease spread and sewage diffusion.
In order to simulate the process of forest fire more truly, the ideal model above is extended, and the specific model after expansion is as follows.
Cellular space: It is consistent with ideal model, but matches the resolution of data such as digital elevation model and remote sensing image in application.
Cell state: In addition to the forest burning state, the state of the cell also expands the variables such as forest material, humidity, terrain slope, wind speed and direction. In addition, in order to more accurately describe the combustion process, the combustion state is subdivided into three sub-states, of which 21 represents the forest that has just been ignited, 22 represents the forest with strong fire, and 23 represents the forest that is turned from an open flame to a dark fire (gradually extinguished). Since the forests of different materials have different durations in various combustion stages, the temperature and humidity will also have an impact on the duration of the combustion stage, therefore, before the forest catches fire, it is necessary to determine that each forest cell is in the three sub-stages of combustion once it is on fire, time (can be achieved by GIS reclassification command) RT1, RT2, RT3. The other three states remain unchanged, with 0 representing no forest cover, 1 representing unburned forests, and 3 representing burnt forests.
Neighborhood definition: Each cell has eight adjacent cells as its neighborhood cells.
Conversion rules: The forest fire spread rules have been extended, assuming that only cells with a state of 22 can burn their neighboring cells; the cell with a state of 21 has just been ignited, and the small fire does not ignite the surrounding cells; the cell with a state of 23 is unable to ignite the surrounding cells due to the weakening of the fire. The specific conversion rules are as follows:
If ni,j ( t ) = 0 or ni,j ( t ) = 3, then ni,j ( t +1 ) = ni,j ( t ) ;
If ni,j ( t ) = 21, then
If
RT_i,j>RT1_ij, thenn_ij ( t +1 ) = 22;Otherwise,
n_i,j` ( t +1 ) = 21,RT_ij = RT_ij +1;
If n_i ,j` ( t ) = 22, then
If
RT_i,j> RT1_ij + RT2_ij, thenn_i ( t +1 ) = 23;Otherwise
n_ij ( t +1 ) = 22,RT_ij = RT_ij +1;
If n_j ( t ) = 23, then
If
RT_ij>=RT1_ij + RT2_ij + RT3_ij, thenn_ij ( t +1 ) = 3;Otherwise
n_ij ( t +1 ) = 23,RT_ij = RT_ij +1;
If n_ij ( t ) = 1 and n_ij ( t ) = 22 ( n_ij an element in the neighbor cell set),
If the current cell is ignited more than the set probability level, then
n_ij ( t +1 ) = 21,RT_ij = 0;Otherwise,
n_ij ( t +1 ) = 1.
Among them, the calculation method for calculating the possibility of forest cells being ignited by neighboring cells is as follows:
First, the probability vector P_k of each surrounding cell with a cell state of 22 is ignited, as shown in Figure :
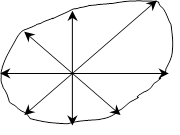
Fig. 115 Vector diagram of the possibility of a cell with a state of 22 igniting the surrounding forest
Then calculate the probability that the current forest cell is ignited by the probability that all its neighbors will ignite it. If the set probability level is exceeded, the random number generation method can be used to determine whether the current cell is ignited.
At this point, a more accurate dynamic model of the spread of forest fires is completed. In this way, the model is integrated into the GIS system, and with the support of spatial database, remote sensing image, digital elevation model and other data, reasonable model parameters are extracted, and the forest fire spread process after the fire occurs in different locations and different weather conditions of the forest, dynamic simulation and prediction have great application value for forest fire prevention and fire rescue work.
Limitations of cellular automata and GIS integration applications
1) Contradictions between simplicity and authenticity
Cellular automata is a highly abstract and generalization of the real world, it can simulate the dynamic evolution of complex space systems concisely and intuitively, at the same time, people will not only doubt whether the real system evolves in this way, but also doubt the authenticity of cellular automata model. The problem is that the cellular automaton only considers the local interaction between the cells, but does not consider the macroscopic effect of the cell space, thus ignoring the macroscopic factors of the real system; the factor layer of the cellular automaton is too single, and the change of the cell state depends on the state combination of itself and the neighboring cell, thus ignoring the influence of other factors; the conversion rules of standard cellular automata are deterministic, while the behavior of real systems is not deterministic, and often manifests as a certain tendency and possibility. Therefore, in practical applications, it is necessary to find a balance between simplicity and authenticity, to avoid the model being too simple, to make the result unreal, and to prevent the model from being too complicated, and to lose the meaning and advantage of the model itself.
2) Space division problem
The cellular automaton is based on discrete, regular spatial partitioning, but how to determine the appropriate spatial resolution is a difficult problem for cellular automata applications. Especially in systems where multiple geographical entities coexist, different entities have different spatial scales, how to determine the same spatial resolution is more difficult for cellular automata modeling. In addition, the rules of geographic system units are different under different spatial resolutions, therefore, how to determine the appropriate resolution and further develop reasonable model rules is a difficult problem in cellular automaton modeling.
3) Time correspondence problem
In the cellular automaton model, time is an abstract concept, the time unit corresponding to the time from T to T+1 in the model is not clear, and the duration of different cells in different states is difficult to determine.
4) Conversion rule definition problem
Reasonable rules are the key to the effect of the model. In cellular automata model, rules are used to divide units into abstract spaces, reflecting the local interaction between units. This local rule is related to and different from the traditional macro rule, and it is very difficult to find a definite rule.
5) Problems with GIS integration
The support of GIS system is a necessary condition for the study of geographic system modeling, although the cellular automaton model and grid GIS have great similarity in spatial data structure, the cellular automaton is a spatiotemporal dynamic model, and the current GIS In essence, it is a static system, and the function of supporting dynamic simulation is weak, the integration of the two has certain difficulties. How to integrate the two closely is a difficult problem that hinders the application of cellular automata in geosystem research.