Introduction of Global Positioning System
Global Positioning System (GPS) is a kind of point measurement and navigation technology using artificial earth satellite. Other satellite positioning and navigation systems include GLONASS of Russia, NAVSAT of European Space Agency, INMARSAT of International Mobile Satellite Organization and so on. The full name of GPS is NAVSTAR (NAVigation Satellite Timing and Ranging)/GPS, which was developed and established by the U.S. military organization. It was implemented in 1973 and completed in the early 1990s.
Introduction of GPS System
GPS system consists of three parts: space part - GPS satellite constellation; ground control part - ground monitoring system; user equipment Part - GPS signal receiver.
GPS Satellite and Its Constellation
GPS consists of 21 working satellites and 3 standby satellites, which are evenly distributed in six orbital planes with an angle of 60 degrees, i.e. four satellites in each orbit, the satellite is about 20,000 kilometers above the ground. It orbits the earth for 12 stars a day, that is, two times a day. GPS satellites transmit navigation and positioning signals to users with two frequencies of L-band radio waves (1575.42MHz and 1227.6MHz), and receive navigation messages and dispatching commands from the ground at the same time.
Ground Control System
For navigation and positioning, GPS satellite is a dynamic known point, and the position of satellite is calculated based on the ephemeris launched by satellite, which describes the parameters of satellite motion and orbit. The ephemeris broadcast by each GPS satellite is provided by the ground monitoring system. At the same time, the work monitoring of satellite equipment and the control of satellite orbit are completed by the ground control system.
The ground control station system of GPS satellite consists of three injection stations and five monitoring stations located in Colorado, USA, to monitor the operation of GPS satellite.
GPS Signal Receiver
The task of the GPS signal receiver (Figure 12-6) is to capture and process the signals transmitted by the GPS satellite, and to determine the distance between the receiver and the satellite according to the time when the signals arrive at the receiver. If the distance from four or more satellites to the receiver is calculated, then the position of the receiver in three-dimensional space can be determined by referring to the position of the satellite.

Figure 12-6: GARMIN Handheld GPS Receiver
Basic Principle of GPS Positioning
The basic principle of GPS positioning is to determine the location by using ranging intersection. As shown in Fig. 12-7, the time when a satellite signal propagates to the receiver can only determine the distance between the satellite and the receiver, but not the direction of the receiver relative to the satellite. In three-dimensional space, the possible position of the GPS receiver constitutes a sphere; when the distance between two satellites is measured, the possible position of the receiver is determined on the circle formed by the intersection of two spheres. After the distance of the third satellite, the sphere and the circle intersect to get two possible points; the fourth satellite is used to determine the exact position of the receiver. Therefore, if the receiver can get the signals of four GPS satellites, it can locate them; when the number of satellites receiving signals is more than four, the four satellites’calculated positions can be optimized.
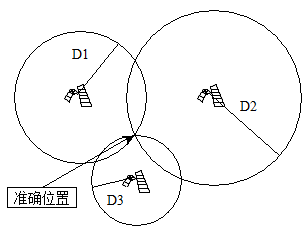
Figure 12-7: Location schematic for ranging rendezvous
GPS Error and Correction
There are many factors contributing to GPS positioning errors, such as errors caused by satellite orbit changes, inaccurate satellite electronic clocks, and changes in the velocity of positioning signals across the ionosphere and the surface troposphere. However, the most serious errors in GPS positioning are caused by the artificially reduced signal quality of the United States military, which can be as high as 100 meters.
The United States has implemented various technologies to prevent unauthorized users from using GPS for military purposes. First of all, the radio signals transmitted by GPS satellites include two different ranging codes, namely, P code (also known as fine code) and C / A code (also known as coarse code). The corresponding two ranging codes GPS provide two kinds of positioning services, namely precision positioning service (PPS) and standard positioning service (SPS). The former mainly serves the US military departments and other chartered departments, while the latter serves the majority of civil users. In addition, by using SA (Selective Availability, optional availability) technology, the positioning accuracy of C / A code is reduced from 20m to 100m, while AS (Anti-spoofing, anti-electronic deception) technology is used to encrypt P code, when implementing AS, non-licensed users cannot get P code.
The artificial errors mentioned above have caused obstacles to the civil use of GPS, but they can be eliminated by differential correction. Differential correction is accomplished by two or more GPS receivers. The method is to place one receiver as a reference station to receive satellite signals at a given location, and then receive signals at other locations with another receiver. The former can determine the artificial interference signal contained in the satellite signals, while the latter can subtract these interference from the received signals, which can be large. The positioning error of GPS is greatly reduced.